ODE Lab I: 4th-order Runge-Kutta Methods#
In this lab, we will study two different 4th-order Runge-Kutta (RK) methods and compare their performance on a simple test problem: the simple harmonic oscillator. We will:
Review the classical RK4 method.
Implement both the classical RK4 and the 3/8 method of Kutta (1901).
Compare their numerical errors and observe the expected 4th-order convergence.
Background#
The Classical RK4 Method#
You have already seen in lecture that the 4th-order Runge-Kutta (RK4) method is a widely used time-integration scheme for ordinary differential equations (ODEs) of the form
At each step, we compute four “slopes”:
Then we update X_{n+1} according to:
This scheme is fourth-order accurate, meaning the local truncation error is \(\mathcal{O}(\Delta t^5)\), and the global error (error over an entire integration interval) behaves like \(\mathcal{O}(\Delta t^4)\).
The “3/8” Method (Kutta, 1901)#
An alternative set of coefficients yielding the same order of accuracy is:
with
Again, this achieves fourth-order global accuracy despite having different coefficients than the more common RK4 method.
Implementing the Methods in Python#
Below, you will find two Python functions: RK4() for the classical method, and RK38() for the 3/8 method.
Both integrate an ODE
over \(n\) steps, starting from an initial state \(X\) at time \(t\), with time step \(dt\).
import numpy as np
from matplotlib import pyplot as plt
def RK4(f, x, t, dt, n):
"""
Integrate an ODE using the classical RK4 method.
Parameters
----------
f : function
The function f(x1, x2, ..., t) returning the derivative(s).
x : np.ndarray
The initial condition (can be scalar or vector).
t : float
The initial time.
dt : float
The time step.
n : int
Number of steps to take.
Returns
-------
T : np.ndarray
Times at each integration step, of length n+1.
X : np.ndarray
Approximate solutions at each step, shape (n+1, len(x)).
"""
T = np.array(t)
X = np.array(x)
for i in range(n):
k1 = dt * np.array(f(*(x )))
k2 = dt * np.array(f(*(x + 0.5*k1)))
k3 = dt * np.array(f(*(x + 0.5*k2)))
k4 = dt * np.array(f(*(x + k3)))
t += dt
x += k1/6 + k2/3 + k3/3 + k4/6
T = np.append( T, t)
X = np.vstack((X, x))
return T, X
def RK38(f, x, t, dt, n):
"""
Integrate an ODE using the 3/8 RK method (Kutta, 1901).
Parameters
----------
f : function
The function f(x1, x2, ..., t) returning the derivative(s).
x : np.ndarray
The initial condition (can be scalar or vector).
t : float
The initial time.
dt : float
The time step.
n : int
Number of steps to take.
Returns
-------
T : np.ndarray
Times at each integration step, of length n+1.
X : np.ndarray
Approximate solutions at each step, shape (n+1, len(x)).
"""
T = np.array(t)
X = np.array(x)
for i in range(n):
k1 = dt * np.array(f(*(x )))
k2 = dt * np.array(f(*(x + k1/3)))
k3 = dt * np.array(f(*(x + k2-k1/3)))
k4 = dt * np.array(f(*(x + k3-k2+k1 )))
t += dt
x += (k1 + 3*k2 + 3*k3 + k4)/8
T = np.append( T, t)
X = np.vstack((X, x))
return T, X
Test Problem: Simple Harmonic Oscillator#
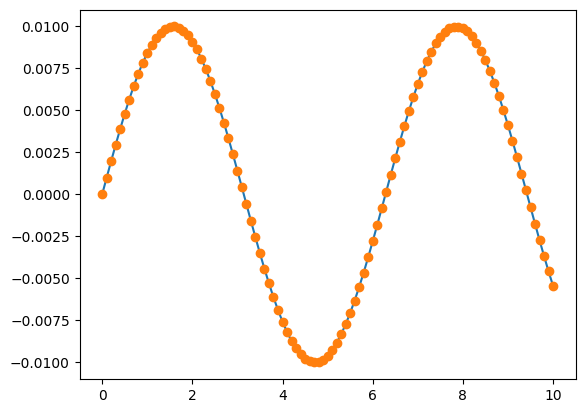
We will use the simple harmonic oscillator with small initial amplitude as our test ODE. Let
If we start with \(\theta(0) = 0\) and \(\omega(0) = 0.01\), the exact solution is
def f_sh(theta, omega):
"""
Returns the RHS of the simple harmonic oscillator.
dtheta/dt = omega
domega/dt = -theta
"""
return omega, -theta
T, X = RK4(f_sh, (0, 0.01), 0, 0.1, 100)
Theta = X[:,0]
Omega = X[:,1]
plt.plot(T, 0.01*np.sin(T))
plt.plot(T, Theta, 'o')
[<matplotlib.lines.Line2D at 0x7f51eb368fb0>]
Measuring the Error#
For a given number of steps \(N\) over a fixed time interval \(t \in [0, T_{\max}]\), we have a time step \(\Delta t = T_\max/N\). After computing the solution numerically, we compare it to the exact solution
We will measure the maximum absolute error in \(\theta\) (though you could also compare \(\omega\)):
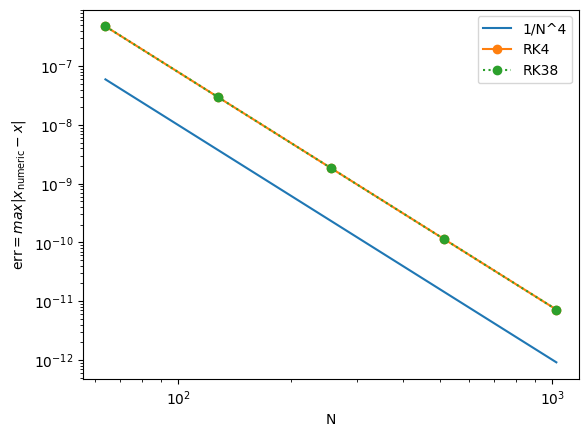
We expect 4th-order methods to show an error scaling like \(\mathcal{O}(\Delta t^4)\), so plotting on a log-log scale should reveal a slope of about -4.
Defines a function
error_RK4(N)that runsRK4()withNsteps and returns the maximum error in \(\theta\).Similarly defines
error_RK38(N)for the 3/8 method.Compares both over a range of
Nvalues (e.g., 64, 128, 256, 512, 1024).Plots the results on a log-log scale, together with a reference line \(\propto N^{-4}\).
def error_RK4(N=100):
T, X = RK4(f_sh, (0, 0.01), 0, 10/N, N)
Theta = X[:,0]
Thetap = 0.01 * np.sin(T)
return np.max(abs(Theta - Thetap))
def error_RK38(N=100):
T, X = RK38(f_sh, (0, 0.01), 0, 10/N, N)
Theta = X[:,0]
Thetap = 0.01 * np.sin(T)
return np.max(abs(Theta - Thetap))
N = np.array([64, 128, 256, 512, 1024])
ERK4 = np.array([error_RK4(n) for n in N])
ERK38 = np.array([error_RK38(n) for n in N])
plt.loglog(N, 1/N**4, label='1/N^4')
plt.loglog(N, ERK4, 'o-', label='RK4')
plt.loglog(N, ERK38, 'o:', label='RK38')
plt.xlabel('N')
plt.ylabel(r'$\text{err} = max|x_\text{numeric} - x|$')
plt.legend()
<matplotlib.legend.Legend at 0x7f51eb3cd190>